개요
스테핑 모터에서의 유니폴러와 바이폴러의 동작 형태 등에 대한 내용입니다. 스탭 모터의 권선에서 흐르는 전류가 항상 한쪽의 방향으로만 흐르는 구동 방식을 유니폴라 구동 방식이라고 하며 스테핑 모터의 권선에 흐르는 전류의 방향이 바뀌는 구동 방식을 바이폴라 구동 방식라고 합니다. 스테핑 모터의 구동 방식에서 유니폴라 방식과 바이 폴라 방식등에 대한 내용입니다.
내용
Unipolar, bipolar 스탭핑모터의 종류는 에는 2 상스태핑 모터와 4상 그리고 5 상등이 있습니다. 여자방식에 따라서는 2 상여자방식, 1~2 상여자방식 등이 있습니다. 그리고 구동방식으로는 유니폴라. 바이폴라, 정전압방식. 정전류방식등이 있으며 출력용량은 1.2A.2A상등에 의해서 분류합니다. 스테핑 모터는 서버모터와 DC모터와는 달리 PULSE제어 방식이며 입력되는 펄스의 속도와 인가되는 펄스의 수에 따라 정해진 각도만큼 회전을 하는 모터입니다.
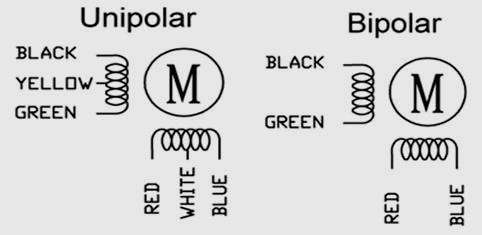
스테핑 모터의 구동 방식은 크게 2가지로 나누어지는데 유니폴라 방식과 바이폴라 방식이다. 아래 그림은 유니폴라와 바이폴라의 회로도입니다. 유니폴라(Unipolar) 구동 방식 유니폴라 구동방식은 전류를 한쪽방향으로 흘리는 방식이다. 큰 토크가 나오지 않는다는 단점이 있지만 간단한 전류 회로가 간단하고 고속에서 탈조 위험도가 낮고고 속 회전 및 순간적인 고속회전이 가능하다는 장점으로 마이크로 마우스 및 라인트레이서에 주로 사용이 된다. 제어 IC로는 SLA7024 M, L297이 있다. 각각의 코일에 1개의 트랜지스터가 접속되고 트랜지스터를 on 하는 것으로서 각 코일에 전류를 흐르게 한다. 코일에는 한 방향만의 전류(A"→A, A"→A, B"→B, B"→B)밖에 흐르지 않아서 유니폴라(편극성) 구동이라고 한다. 이 방식은 코일에는 동일시간에 A상, A'상, B상, B'상의 한쪽밖에 전류를 흘리고 있지 않으므로 저속 영역에서는 토크(torque)를 크게 취할 수 없다는 결점이 있다. 4상 모터에는 1상 여자, 2상 여자, 1-2상 여자라는 여자 시퀀스(sequence, 순서)가 있고, 이 방법의 선택에 따라 입력 펄스와 스텝각(한 펄스에 대한 회전각)의 특성이 달라진다. E-Board에 포함된 모터 드라이버(motor driver) 회로는 유니폴라 구동 방식을 쓰고 있다. 8255A 포트 C의 하위 4비트(PC0∼PC3)에 저항을 통해 트랜지스터 TR1∼TR4(2 SD633)에 연결되며, 트랜지스터 2 SD633이 트랜지스터 스위치로 동작하여 모터를 제어한다.
기타
바이폴라(Bioplar) 구동 방식 권선에 흐르는 전류를 교대로 바꾸어주는 방식이 바이폴라 방식입니다. 비교적 회로가 복잡하고 고속회전 시 토크가 나오지 않는 단점이 이 있으며 유니폴라 방식의 비하여 정밀도와 저속에서의 토크 성능이 좋아 로봇제어에 많이 사용이 되는 방식입니다. 모타의 동일권선에 입력펄스의 극성을 바꿔주는 방식. 출력단은 약간 복잡하지만, 유니폴라 구동방식에 비해 각도의 정밀도가 좋으며 저속에서 보다 높은 토르크를 얻을 수 있습니다. 이 바이폴라모타는 4,6,8선의 모타를 사용할 수 있으며 대개 6선보다는 4,8선의 모타를 사용 시 효율이 더 좋으며. 이 바이폴라드라이브에는 직렬연결, 병렬연결 방식과 단전원구동 및 2 전원 구동방식이 있습니다. 제조사별 특징을 확인합니다. 제어 IC로는 L297, L298이 있습니다. 여기에서 L297은 스텝모터를 정전류 구동하기 위한 모든 회로가 포함된 컨트롤러입니다. L298 은 Bipolar구동을 위한 두 개의 H Bridge Driver를 포함하고 있으며, 모터 드라이버를 구매하실 때에는 사용하시려는 모터가 2상인지 5상인지와 유니폴라 구동방식인지, 바이폴라 방식인지 확 인 후 제품을 구매하여 사용합니다. 다소 복잡한 회로이지만 저속 영역에서의 토크를 개선하는 바이폴라 구동이라는 방법이 있습니다. 이 방식은 모터의 코일에 교대로 전류를 흘리는 회로입니다. 유니폴라 구동과 비교하여 트랜지스터가 2배 필요하며 바이폴라 구동 방식은 코일 2개가 직렬로 연결되고 유니폴라 구동에 비해 2배의 전원 전압을 필요로 하게 됩니다. Bipolar 방식의 경우 코일의 이용도가 높고 저속에서 더 큰 토크를 얻을 수 있는 장점이 있지 만고 속에서는 Unipolar 방식이 좀 더 유리한 특성이 있습니다. 스텝모터는 일반 DC 모터와는 달리 배선수가 많으며. 보통 4 개에서 6 개의 선이 나와있어 어느 쪽에 구동전원을 연결하는지 잘 알 수 없으므로 사용 시 제조사의 매뉴얼을 확인합니다. 스텝 각이 3.6 도인 스텝 모터에 100 개의 펄스를 가하면 1 회전하게 됩니다.
360도 회전, 펄스의 유무 또는 극성으로 그 내용을 표현하는 디지털 신호의 구성 방식. 펄스의 유(마크)를 전압 +V 펄스의 무(스페이스)를 전압 0 [V]에 대응시키면, 마크 +V의 전압치가 되는 펄스 구성을 유니폴라(unipolar) 신호라고 하며, 마크를 전압 +V와 -V 스페이스를 전압 0V에 대응시켜 마크가 생길 때마다 전압 +V, -V를 교대로 변환하는 펄스 구성을 바이폴라(bipolar) 신호라고 합니다. RZ(return to zero) 또한 스텝 모터란 입력 펄스에 맞추어 일정 각도 단위로 회전하므로 펄스모터라고도 하는데 일정 각도로 회전하므로 위치 정보를 궤환 시키지 않고 현재의 위치 정보를 알 수 있으므로 마이크로 마우스 일반 사무용 프린터의 모터 등 간단한 이동 제어시스템에 많이 사용합니다. 스텝 모터의 종류는 크게 3 가지가 있습니다. PM=Permanent magnet형 타입과 VR(Variable Reluctance) 타입 HB(Hybrid) 형 등입니다. 스텝 모터의 특징으로는 펄스 신호에 따라 고정밀도로 정해진 각도까지 회전시켜 엔코더, 포텐시등의 설치가불필요하여 제어가 쉬우며. 디지털 신호형태로 직접 제어하므로 마이크로프로세서에 접속이 용이하고 회전 시 오차 각이 누적되지 않습니다. 또한 정지할 때 큰 정지 토크가 있으며 모터 브러시 등의 접속 부분이 없으므로 유지 보수측면에서 유리하며 초 저속으로 높은 토크 운전을 할 수 있습니다.
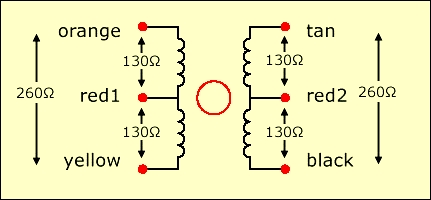
아래 회로도는 바이폴라 회로도입니다.
'전기 자동화 용어' 카테고리의 다른 글
| 샘레스 파이프 (0) | 2023.03.03 |
|---|---|
| 근접스위치에 대하여 (1) | 2023.03.03 |
| KEMA규격 (0) | 2023.02.23 |
| 배수밸브 (0) | 2023.02.16 |
| 싸이리스터란 무엇인가? (0) | 2023.01.31 |
| 도전율 이란? (1) | 2023.01.30 |
| 자동화 용어 (1) | 2023.01.28 |
| 자동제어 영어표기 (0) | 2023.01.25 |




댓글