개요
백터 인버터는 서보시스템과 비슷한 역할을 합니다. 서보시스템에서는 서보모터의 경우 영구자석타입의 전동기를 제어하고 백터 인버터에서는 유도전동기를 제어합니다. 벡터 인버터는 모터의 전류를 여자분 전류와 토오크분 전류로 분리시켜 제어하는데 구체적으로, 속도검출기로 엔코더를 사용합니다. 엔코더의 피드백으로 모터의 슬립을 검출하여 부하토크의 크기를 연산으로 구하여 이 토크에 적합하도록 모터의 전류를 흐르게 함으로써 소정의 여자분 전류를 확보합니다. 백터인바터는 고 응답, 고정도, 고신뢰성을 요구하는 servo급 system에 적용할 수 있습니다. 벡터 제어에서는 백터제어용 전용모터를 사용하게 됩니다.
설명
백터 인바터의 종류에서 센서리스 타입이 있습니다.센서리스 벡터 인버터는 모터에서 토오크를 발휘하는데는 자속과 전류가 직각으로 쇄교 하여 힘이 발생합니다. 그러나 유도 전동기의 경우에는 유도현상을 일으키는 구조상 자속과 전류가 직각으로 쇄교 하게 기계적으로 구성할 수가 없습니다.백터인바터에서는 백터 모터를 사용 하여야 합니다. 백터제어의 내용은 전기적으로 자속을 일으키는 전류와 토오크를 일으키는 전류가 직각이 되게 인버터에서 공급하는 전류를 위상제어로 엔코더 제어라고 할 수 있습니다. 센서리스라는 용어는 엔코더의 위상을 별도의 센서 없이 자속과 토오크 성분을 제어하는 방식이 센서리스 벡터제어 방식입니다.
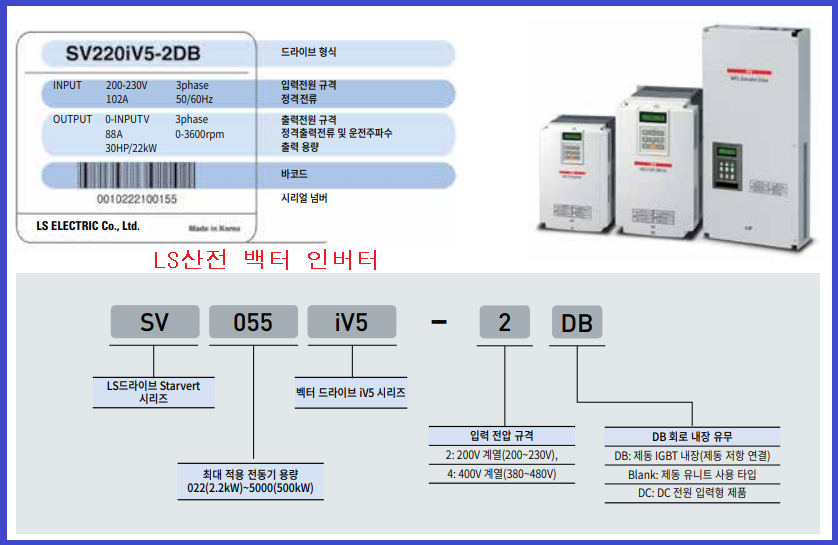
제품
서보의 경우 비교적 작은 용량에서 사용하고 백터 인버터의 경우 수십K의 용량에 적용할 수 있습니다. 서보시스템이 백터시스템보다 정밀 제어가 가능합니다. 벡터 인버터로 운전하는 데 있어서 백터 모터가 돌지 않을 경우가 있는데 이럴 경우 우선 인버터 출력 U, V, W상이 각각 모터의 U, V, W상으로 올바르게 배선이 되어야 합니다. 백터 인바터 선정 시 모터의 사양에 적합한 인바타를 선정하여야 합니다. 제조회사 모터의 명판을 참고하여 선정합니다. 모터의 명판을 참고하여 레이티드 슬립 값을 설정 값등을 지정합니다. 벡터 인버터로 운전하는데 모터는 돌지만 속도가 나지 않을 경우가 있습니다. 이럴 경우에서는 Encoder의 Pulses 값이 적절히 설정되어 있는지를 확인합니다. Encoder 백터 인바타의 엔코더는 피드백의 중요한 역할을 담당합니다. 엔코더의 펄스에 문제가 생기면 백터인버터의 운전 이상의 원인이 됩니다. 백터 인바터의 백터 모터의 속도가 30-50 rpm이상 증가하지 않을 경우 문제가 있는 것입니다. 이럴 경우 백터 모터를 정지시킨 후 Encoder의 위상을 점검하여 상을 변경합니다. 벡터 인버터로 운전하는데 모터가 속도를 추정하지만 반대방향으로 회전할 경우. 인버터의 상과 상의 출력을 서로 바꾸어 결선하십시오. 백터 인바타에서의 엔코더의 피드백 신호인 A.B상의 위상을 정확히 결선하는 것이 중요합니다.국내 백터인바타는 LS산전의 IV5 시리즈 입니다.
백터 인바터 관련 내용입니다.
'자료실' 카테고리의 다른 글
| SIEMENS PLC용 케이블 (0) | 2022.11.16 |
|---|---|
| 삼원 테크 (0) | 2022.11.16 |
| GFMN MOTOR (0) | 2022.11.16 |
| ROSS ISO규격 밸브 (0) | 2022.11.16 |
| 인바타 고장 대책 (0) | 2022.11.16 |
| LS산전 IV 시리즈 (0) | 2022.11.16 |
| SV IP 인바타 자료 (0) | 2022.11.16 |
| 도비바 인바타 VF카다로그 (0) | 2022.11.16 |




댓글