기술 자료
▷▷기술 자료정보≫전기용어 2014년도. 내용보기:용어 위상차.phase difference.위상편이.phase variation.위상천이.phase shift.quadrature phase.위상차
Quadrature Encoding:직각 위상차 엔코더
아래표와 같이 4개의 출력타입을 갖는 형식으로 90도 위상을 가지고 출력한다.
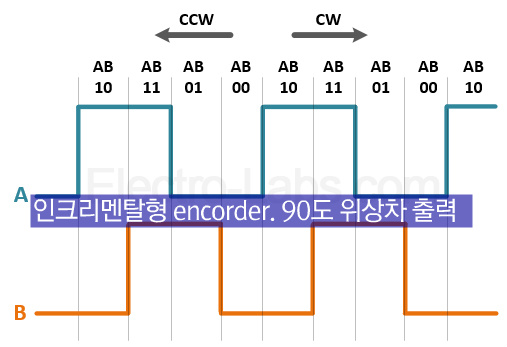
CW와 CCW는 그림에서 보듯이 90도 위상차를 가지고 있습니다.
quadrature encoder comes from the four possible output states of the encoder sensor.Rather than just a single pulse indicating a slotted or striped track in a codewheel,quad encoders use a pair of tracks to go through four distinct phases. . .quad means four The following table summarizes the four possible encoding states as the disc rotates,either counter-clockwise or clockwise.The tracks are labeled Channel A and Channel B.
위상차 출력
동일주파수 선상.동일주기선상의90도 파형 를 갖는 두 파형의 상대적 위상 차이.현장에서는 인크리멘탈 엔코더의 경우 CW는 가산.CCW은 감산 (가감산 카운터 연결시) 용도로도 사용한다.
ENCORDER 용어
Encoder 검출 방법에 의한 분류
광학식 : Incremental Encoder, Absolute Encoder.Magnetic Encoder(자기식) : Resolver
샤프트 구조에 의한 분류 :중공축식 .샤프트식
Incremental 방식의 Encoder :슬롯판구조가 비교적 간단, 경제적인 단가등의 장점 신호 전달 중 노이즈를 카운터에 축적하는 결점이 있기 때문에 노이즈에 대한 대책 필요,전원이 끊어진 경우 다시 전원을 투입하여도 원래 위치의 표시는 불가능 회전축(Shaft)의 회전각도를 그 출력 펄스수로 변환하여 위치 검출함.즉 입력축의 이동량(회전량)의 증가,감소를 검출하는 방식으로서 90 의 위상차를 가진 A, B 상과 원점 출력신호인 Z 상으로 구성되고 TTL.LINE DRIVE 출력형등이 있다연산카운터.PLC 등과 조합하여 위치, 속도, 방향 제어가 가능.
Absolute Encoder:회전축(Shaft)의 회전각도에 대한 출력값이 절대적으로 나타나는 센서로서 어떠한 외부 환경에 따라 변화되지 않으며 전기적인 노이즈에 강함.다수 발광소자와 수광소자를 가지고 회전 각도에 따라서
2진코드(binary code),그레이코드(gray code),아스키코드(ascii code)로 출력(Output)이 되며 2진형코드는 출력된 2진코드를 직접 2진코드로서 사용이 가능하며 그레이코드나 아스키코드를 사용할때에는 2진형으로 변환시켜 사용할 필요가 있다.그레이코드형은 스리트판이 1회전을 하게되면 바이트수가 1바이트(byte)이므로 2진형과 같이 동시에 변화하지 않으므로 과도적인 노이즈의 발생이 적어 안정된 동작을 할 수가 있다.비트(bit)의 길이로서는 8비트, 12비트, 16비트 예)28Bit=256 P/R 임 전원OFF시에도 고유의 on 현재 위치 기억
Resolver :각 코일간 위상차를 이용하여 각도 제어. 정확한 제어가 가능 하지만 Noise 에 약하다.

분해능(P/R : Pulse/Revolution) :회전축(Shaft) 1 회전당 출력되는 펄스 수임.
최대응답 주파수(KHz Max) :전기적으로 응답이 가능한 최대의 주파수 즉,1 초에 응답 가능한 출력펄스의 수임.
출력상 :출력신호의 종류를 말함. 즉, A 상, A. B 상, A. B. Z 상, A. A. B. B 상, A. A. B.B. Z. Z.상,A. A. B. B. Z. Z. U. U. V. V. W. W 상 등의 다양한 종류가 있다.A, B 상 :A 상과 B 상 출력신호의 위상차 90 로 이루어진 Digital 신호로서 회전방향(정, 역회전)을 판별하기 위한 신호임.Z 상(Zero 신호) :1 회전에 1 개만 출력되는 신호로서 원점신호라 한다. 즉, 외부 카운터의 리셋이거나 원점 위치 검출용이다.예로들면 오토닉스 엔코더 E50S8-100-3-T-24 이면 A.B상 출력은 CW.CCW.방향으로 1회전에 100P/R Z출력은 원점 출력이라고도 하듯이 360도 회전에 1펄스만 출력한다.
U. V. W 상 :AC Servo Motor 에 많이 사용되는 출력방식으로서 극 수(Pole)에 따라 각도 검출을 용이하게 하기 위한 방식.(User 에 따라 4 극(2Pulse), 6 극(3Pulse), 8 극(4Pulse) 이 주로 쓰임)
CW 회전(Clock Wise) :Encoder 의 축(Frame 측)에서 보아 시계방향과 같이 회전하는 것을 말함.
CCW 회전(Count Clock Wise) :Encoder 의 축(Frame 측)에서 보아 반시계 방향과 같이 회전하는 것을 말함
오픈 콜렉터(Open collector) 출력방식 :트랜지스터의 콜렉터 단에 부하를 연결하지 않고 그대로 출력하므로 외부에서 부하(RL)를 연결해 주어야 함.
전압 출력방식 :트랜지스터의 콜렉터 단에 부하를 연결하여 출력하므로 외부에서 무부하 상태로 사용 가능.라인드라이버(Line Driver) 출력방식 :Data 전송용의 출력 전용 IC 를 이용하여 출력하는 방식으로 입력 전원이 5V 전용이며 System 축에 Receiver IC 가 구비되어 있어야 함.
Complemental 출력방식 :트랜지스터가 쌍으로 이루어진 회로로서 Noise 에 강하고 전송 거리가 길다.
Totem Pole 출력방식 :상시전류가 흘러 Noise 에 강하고 파형 왜곡이 적으며 전압 출력 및 Open Collector 사용시 부하(RL)로 방식 변경 가능.
최대 허용 회전수 :기계적(베어링등의 기구)으로 허용되는 최고 회전수인 정상적인 출력신호를 얻기 위한 회전수
기동 토크 :엔코더축을 최초 기동시키는데 필요한 최소 토크
허용 축 하중 :축에 허용 가능한 최대 하중으로 수형 허용 축 하중과 수직 허용 축 하중이 있다.
오토닉스 멀티턴 업솔루트 엔코다 EMP50 시리즈
multi turn absolute encoder multi turn absolute encoder EPM50
1회전 절대 위치값과 회전수를 카운트한 값을 함께 출력하는 로터리 엔코더
| 그림보기 | 오토닉스 멀티턴 모델구성표 |
  |
EPM50S8-1013-B-PN-24 |
|
|
|
|
|
|
|
|
|
|
|
Ø50mm 축형 멀티턴 앱설루트 로터리 엔코더 EPM50 시리즈는,23bit의 분해능과 정밀도로 1회전에 대한 절대 위치값과 회전수를 카운트한 값을 동시 출력 가능하며,기존 Parallel 출력방식에 더해 Serial 출력방식 추가 출시로 선택의 폭을 넓혔습니다.업계 1위 오토닉스가 국내 최초로 국산화에 성공한 EPM50 시리즈는 고정밀 모터 제어와 산업용 로봇 등의 제어에 최적입니다.
오토닉스 멀티턴 엔코다 카다로그 보기
TAMAGA ENCORDER
TAMAGA ENCORDER 타마가 엔코더 카다로그.
P&F ENCORDER
P&F ENCORDER 카다로그
'전기 자동화 용어' 카테고리의 다른 글
| 저 감 절연 이란? (0) | 2022.12.28 |
|---|---|
| EMI.EMC.EMI . EMC Filter (0) | 2022.12.28 |
| 슬라이닥스 용량 계산법 (0) | 2022.12.28 |
| 비율차동계전기. (0) | 2022.12.27 |
| 슬립 링 .Slip Ring (0) | 2022.12.26 |
| SAFTY RELAY (0) | 2022.12.26 |
| 토템풀 출력 (0) | 2022.12.22 |
| NPN 출력과 PNP출력 (0) | 2022.12.22 |



댓글